AT 309 Lab 12: Pix4D
Introduction
Pix4D is a photogrammetry software with the primary use for drone mapping. The software has multiple templates to choose from, for example, there is "3D Map" where Pix4D processes images into a map or "3D Models" where Pix4D turns images into an actual model for viewing. It creates a visual for images collected on the field that users can interact with and use for various reasons. Since the direct purpose of Pix4D is for drone mapping, the applications of UAS are numerous. Lab 12 consisted of using the Pix4Dmapper application and understanding the software more.
Discussion
Before diving straight into Pix4Dmapper, it was required to look into the images metadata. There were four groups of images and how they were obtained. There was the Mavic 2 Pro, XT2 RGB, XT2 Thermal, and A6000. Upon inspection, majority of them were actually geotagged. The only exception was the A6000, where it was required to insert the geotag data through a separate file, but that is a later step. The first one was requiring the Mavic 2 Pro images to be processed into a 3D map. After initially loading the images into Pix4Dmapper, Figure 1 shows the data when uploaded.

Figure 1: These are the plotted images on the application after being initially uploaded.
It was then time to process the images into a map. After a three hour long process (No kidding), Pix4D processed the eighty-one images into a map. Figure 2 shows the final result.

Figure 2: This is the area mapped out using the 3D Map template; the figures above show the initial images and their placements in the geographical world.
This is a great way to visualize the data and create an interactive model for users. It is simply a different and effective way to look at images rather than flipping through each one or stitching them together for an orthomosaic that is not as detailed as the 3D map created. Each data process comes with their own quality report to better understand how the processing went and if there was any issues that arrised.
One major issue when using the Mavic 2 Pro for this type of work is to take into account distortions that can happen. The most common seen is the fact that the camera equipped has a rolling shutter function. Rolling shutter is a method of collecting images through the use of scanning rather than a full on snapshot. The image can get blurry and have portions of the field missing just simply because the drone could be moving too fast for the shutter speed. Pix4D is equipped with options to compensation for this distortion to accurately display the image.
After the first test of patience, it was time to process the XT2 RGB images. A quality report was generated at the end of this data process as well. Figure 3 shows what was created in under fifteen minutes.

Figure 3: As shown, it is infact the same area but covered in a smaller number of images; the overall quality of the map is decreased.
As one can observe, the overall quality of the 3D map is lower. The number of images appears to have a direct relationship with the quality of the map, which means more coverage would contribute to a higher quality model. To change it up, the next data process was for XT2 Thermal, which means the "Thermal Camera" template was used. It is essentially the 3D map template but for thermal imagery. Figure 4 shows the model created.

Figure 4: This is the same area under a thermal camera.
The quality report was also saved at the end of this. The map is overall hard to see. This could be due to the fact the items within the field were not relatively warm at the time. Regardless, the use of the thermal camera template was also useful in the same way that the 3D map template is. For the final data process, it was mentioned earlier that the images from the A6000 were not geotagged. To add those geotags into Pix4Dmapper, a separate file is needed that lists out each value. Figure 5 shows the geotag table after uploading them onto Pix4Dmapper.

Figure 5: This is the table of every single image included within the A6000 project.
It is a fairly simple process, but whenever in doubt, it is important to have this information and to be able to implement them from file if they are not present. After inserting the file, it was time to data process them. Figure 6 will show the final result.
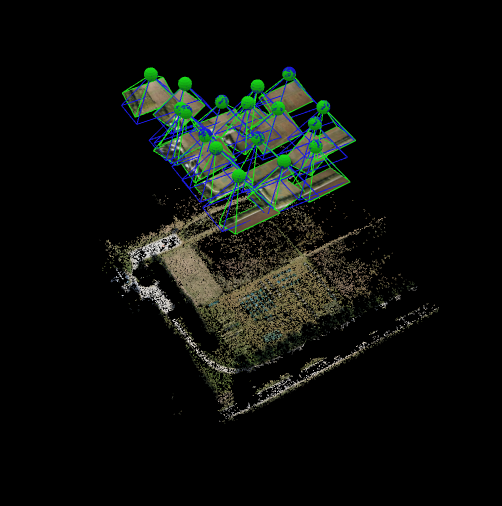
Figure 6: This is the map generated through the A6000 images.
As we can see, the geotags did in fact work and there were not any issues, as also shown from the quality report. The use of the 3D map function was very useful in understanding how to better visualize data and different methods on doing so, along with the different sensors used and their quality.
Conclusion
Pix4D was a very useful software. It can be used for different models through different templates that can be chosen. The software is used for drone mapping, which means the different applications for it is numerous, but the main purpose is to map out the images collected. Lab 12 helped with understanding the different sensors that can be used, but it made me aware of distortions that can happen, more specifically rolling shutter. It also helped to express the need for having overlapping images to help improve the quality of the map.



Comments
Post a Comment